转自抠哥的GitHub
觉得有用请点个star⭐作为支持~
GitHub链接:https://github.com/kouge0510/5-dof-vision-combined-robot-arm?tab=readme-ov-file
五自由度视觉结合机械臂开源
2023年8月最后一次更新内容:
-一个完整的系统,控制机器人手臂系统的同时检测形状和二维码
- 使用Python在树莓派4B上实现此系统
- 使用中凌科技公司的伺服电机和Uno微控制器
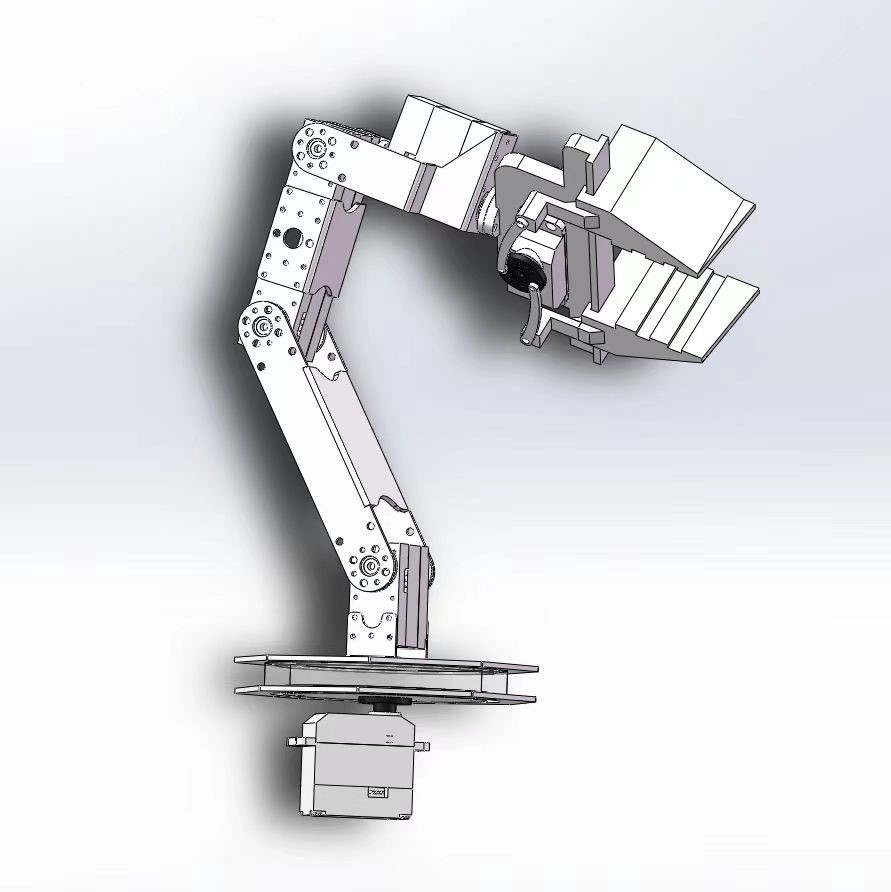
- 六自由度机器人手臂
-有2个PWM伺服电机和4个总线伺服电机

有两种解决方案:
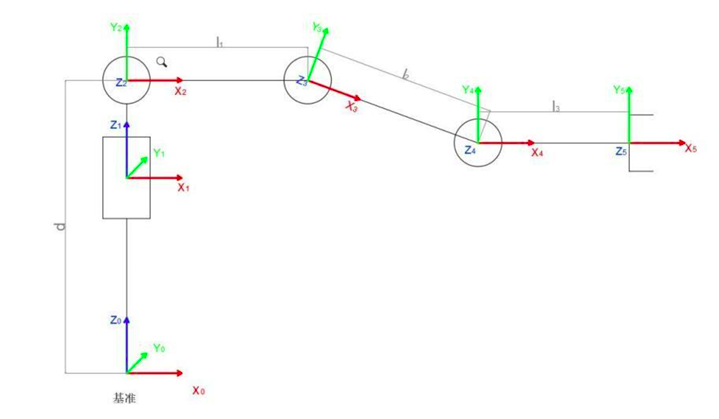
-1: 通过最终坐标点的逆向导出动作,并使用逆向运动学
-2: 用正向运动学直接调整每个可以控制的伺服电机的角度,相对较为僵硬,只能旋转一个固定的角度
文件结构
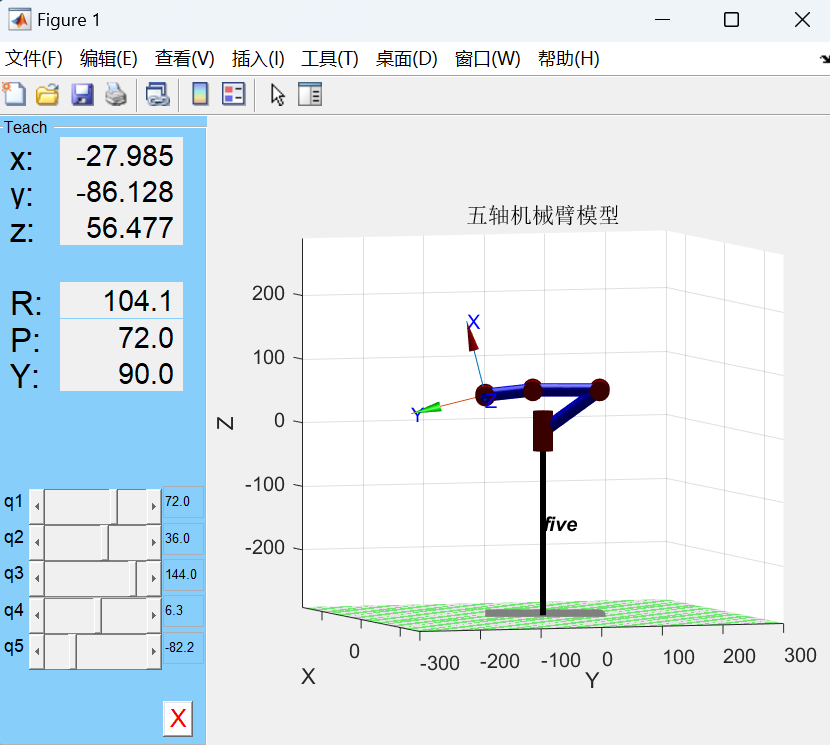
-arm_control.py 展示了如何使用逆向运动学来控制机器手臂。
- cluster.py 展示了使用OpenCV进行物体检测的基本方法。在这个程序中,抠哥使用了Python的OpenCV库来调用它,并展示了如何使用RGB值来检测不同颜色。
- shapes.py 展示了使用霍夫圆变换算法和边缘点算法来检测三角形和矩形。
- uart.py 展示了UART协议的基本使用方法。抠哥提供了两种使用方式,可以单线程使用,也可以多线程使用。
- zcode.py 使用了pyzbar库来检测二维码。
- word_detect.py 是最终的解决方案。由于抠哥是在一个不再对其他项目开放的竞赛中使用的,所以没有展示全部内容。
进程与特点
- 程序已完成
- 可以使用uart通信
- 支持所有版本的树莓派
- 支持3.8以上版本的Python
- 支持4.0以上版本的cv
- 可以和其他品牌的ARM开发板兼容使用
下方可以免费下载
